- 新能源动力总成第一股越博动力究竟强在哪
- 北京限外地牌新规出台 上汽大通G10送京牌 北
- 智博会黑科技来袭,全新CS35PLUS一跃成焦点
- “春笋计划”赋能 网通社构建内容生态闭环
- 再出发!道骐润滑油挑战尼泊尔万里行
- 长安CS55蓝动版让你两者兼得
- 德国宝沃BX6快人一步,抢占先机
- 2018年上半年中国新登记机动车1636万辆 高于
- 东莞车主卖普拉多 全国竞价在天天拍车多卖近6
- 新能源汽车产销两旺 多家银行三季度业绩预喜
- 搭载1.5T三缸涡轮增压发动机 小型SUV缤越上市
- 北汽新能源ARCFOX新款LITE于广州车展发布预售
- 现代HDC-2 Grandmaster概念车亮相广州车展
- 续航510公里 蔚来ES625.8万起售/补贴后19万
- 崭新物种 广汽传祺概念车—传祺ENTRANZE
- 实拍18款进口丰田兰德酷路泽4600中东版
- 真正越野天才 18款丰田酷路泽5700配置解读
- 浓厚运动气息 2018款奔驰GLS500实车解读
- 布局移动互联 西雅特全新概念车预告图
- 清源汽车两款车型定名清源小尊与清源尊者
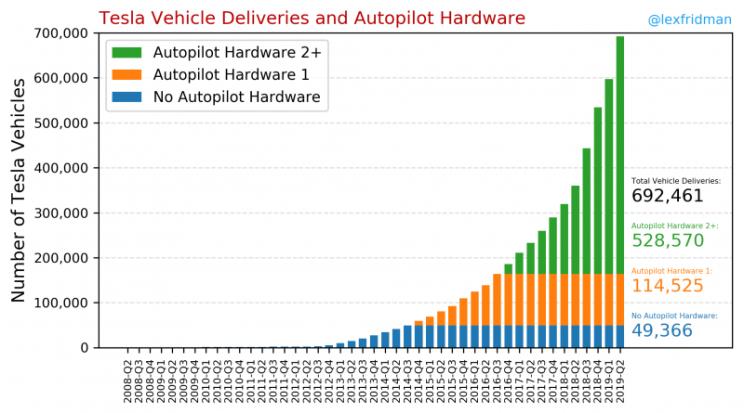
528570辆特斯拉车辆 配置第二代Autopilot
壹号编辑近期从外媒了解,已逾50万辆上路行驶的特斯拉车辆配置了第二代Autopilot(Autopilot 2)。该数值相当于特斯拉总交付量的近四分之三,Fridman认为该数值很大,十分有助于降低交通事故的发生率。悉麻省理工学院自动驾驶汽车研究科学家Lex Fridman数据汇总自季度投资者报告,并从另一份MIT研究中汇总了Autopilot的使用率,其行驶里程数数据则源自于多个渠道,其中就包括特斯拉创始人兼首席执行官埃隆·马斯克本人,展示了搭载Autopilot 2的增长曲线图,该数据始于2016年4月。

『特斯拉Model 3』
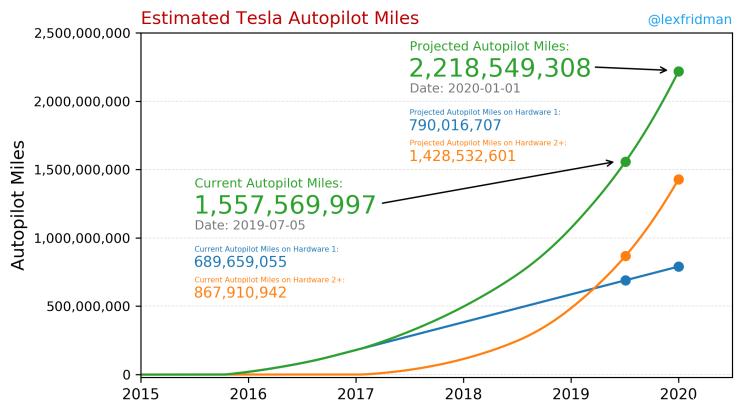
具体来看,据Fridman的研究预计,截止至目前,启用Autopilot的行驶里程数已逾15亿英里(逾24亿公里),其中启用Autopilot 2(AP2)的行驶里程数约为8.68亿英里(近14亿公里)。据此推算,到2020年1月,使用自动驾驶软件的行驶里程数将逾22亿英里(约合35亿公里),而使用AP2的行驶里程数将逾14亿英里(约合22亿公里)。
那么,Autopilot 2(AP2)和Autopilot 1(AP1)有哪些显著差异?特斯拉投入了50多万辆自动驾驶车辆,采集了数百万英里的行驶里程数据,使得该公司算法的精度远超同行的计算机仿真,公司为旗下车辆配置了一套感测装置,其中包括8个摄像头、雷达和超声波传感器,即使可见度很低,仍能实现高精度的导航。

『特斯拉Model X』
在YouTube上,用户KmanAuto最近发布的演示视频中展示了Autopilot 1和Autopilot 2(包含完全驾驶套件)的差异。利用两辆特斯拉车辆:一辆搭载AP1的Model S和一辆AP2的Model X,在相同条件下,两辆车在他提及的“最恶劣的驾驶情境道路”上行驶。
在行驶过程汇总,搭载AP1的车辆的前置摄像头数量有限,且出现了多次故障,需要驾驶员人为介入操作。而搭载AP2的车辆则无需如此。KmanAuto指出,该车辆能投影基于3D技术的路径,预计道路特点(如:高程变化),这是AP1所无法实现的。
从视频展示可以看出,行驶时两者的差距很明显,就像直接从桌面电脑看到那般。相较于AP1,AP2多出的摄像头拥有长焦距、广角功能,侧视摄像头使得AP2能够更精准地追踪车道线。举个例子,搭载AP2的Model X熟练地完成隐藏式不擦地向右旋转,而搭载AP1的Model S则偏离了车道。

『特斯拉Model S』
在整个驾驶过程中,搭载AP2的Model X的人为介入次数仅为3次,且用KmanAuto的话说,该道路的驾驶难度相当高。KmanAuto在视频描述中写道:“在本测试中,AP2.x太赞了,成功完成了对测试赛道的导航。”同时他还指出,随着时间的推移,AP1的性能也有所提升,但精度仍无法与AP2相媲美。
